Note
Go to the end to download the full example code.
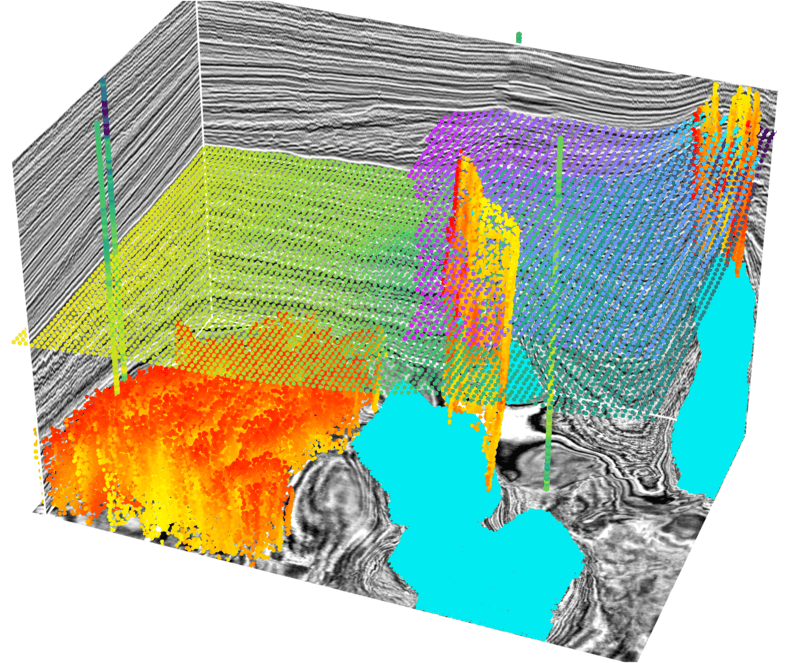
Native VisPy point clouds on the F3 demo#
Use VisPy’s built-in Markers visual to render interpreted F3 objects as
clear point clouds. This is the VisPy counterpart of
examples/viser/06_point_cloud.py.
Note
VisPy Markers uses screen-space marker sizes. The automatic PNG save
captures the canvas when plot3D is called; press s after
rotating/zooming/resizing to save the adjusted view. Transparent PNG
export is supported by default, including the point-cloud markers and
colorbar; pass Plot3DSave(transparent_bg=False) only when an opaque
background is desired.
# sphinx_gallery_thumbnail_path = '_static/cigvis/3Dvispy/19.png'
from pathlib import Path
import numpy as np
from scipy.ndimage import binary_erosion
import cigvis
from cigvis.io import load_skins
def _extend(nodes, new_nodes):
if new_nodes:
nodes.extend(new_nodes)
def salt_body_points(salt, step=(5, 7, 4), max_points=30000):
sample = np.asarray(salt[::step[0], ::step[1], ::step[2]]) > 0.0
if not np.any(sample):
return []
eroded = binary_erosion(
sample,
structure=np.ones((3, 3, 3), dtype=bool),
border_value=0,
)
boundary = sample & ~eroded
pos = np.argwhere(boundary).astype(np.float32)
pos *= np.asarray(step, dtype=np.float32)
return cigvis.create_point_cloud(
pos,
color=(0.0, 0.92, 0.95, 1.0),
size=4.0,
max_points=max_points,
seed=11,
)
def surface_points(surface, zmax, step=10, cmap='viridis', max_points=45000):
ii = np.arange(0, surface.shape[0], step, dtype=np.float32)
jj = np.arange(0, surface.shape[1], step, dtype=np.float32)
grid_i, grid_j = np.meshgrid(ii, jj, indexing='ij')
depth = np.asarray(surface[np.ix_(ii.astype(int), jj.astype(int))],
dtype=np.float32)
valid = np.isfinite(depth) & (depth > 0.0) & (depth < zmax * 1.2)
if not np.any(valid):
return []
pos = np.column_stack([grid_i[valid], grid_j[valid], depth[valid]])
return cigvis.create_point_cloud(
pos.astype(np.float32),
values=depth[valid],
cmap=cmap,
size=3.4,
max_points=max_points,
seed=13,
)
def fault_skin_points(skin_dir, max_points=35000):
vertices, _faces, likelihood = load_skins(str(skin_dir),
endian='>',
values_type='likelihood')
return cigvis.create_point_cloud(
vertices.astype(np.float32, copy=False),
values=likelihood.astype(np.float32, copy=False),
cmap='autumn',
size=3.0,
max_points=max_points,
seed=17,
)
def well_log_points(log_path, zmax, sample_step=14):
nlog = 4
npoints = 2121
x = np.asarray([259, 619, 339, 141], dtype=np.float32)
y = np.asarray([33, 545, 704, 84], dtype=np.float32)
z = np.arange(0, 0.2 * npoints, 0.2, dtype=np.float32)
raw = np.fromfile(log_path, np.float32).reshape(nlog, npoints)
with np.errstate(divide='ignore', invalid='ignore'):
values = 0.5 * np.log(raw)
all_pos = []
all_values = []
for i in range(nlog):
valid = np.isfinite(values[i]) & (raw[i] > 0.0) & (z < zmax * 1.2)
valid_idx = np.flatnonzero(valid)[::sample_step]
if valid_idx.size == 0:
continue
all_pos.append(
np.column_stack([
np.full(valid_idx.size, x[i], dtype=np.float32),
np.full(valid_idx.size, y[i], dtype=np.float32),
z[valid_idx],
]))
all_values.append(values[i, valid_idx])
if not all_pos:
return []
pos = np.concatenate(all_pos).astype(np.float32)
values = np.concatenate(all_values).astype(np.float32)
return cigvis.create_point_cloud(
pos,
values=values,
cmap='viridis',
size=5.0,
)
def pick_points():
pos = np.asarray([
[192, 634.1855, 32.3816],
[192, 616.5631, 139.5132],
[192, 600.3925, 220.0604],
], dtype=np.float32)
return cigvis.create_point_cloud(
pos,
color=(0.0, 0.95, 1.0, 1.0),
size=10.0,
)
if __name__ == '__main__':
root = Path('/Volumes/T7/DATA/cigvisdata/F3/')
seisp = root / 'seis.dat'
saltp = root / 'salt.dat'
hz2p = root / 'hz.dat'
unc2p = root / 'unc2.dat'
logp = root / 'logs.dat'
skin_dir = root / 'skins'
ni, nx, nt = 591, 951, 362
shape = (ni, nx, nt)
seis = np.memmap(seisp, np.float32, 'c', shape=shape)
nodes = cigvis.create_slices(seis,
pos=[ni - 2, 25, nt - 2],
cmap='gray',
clim=[-2.0, 1.5])
salt = np.memmap(saltp, np.float32, 'c', shape=shape)
_extend(nodes, salt_body_points(salt))
hz2 = np.fromfile(hz2p, np.float32).reshape(ni, nx)
_extend(nodes, surface_points(hz2, nt, step=10, cmap='viridis'))
unc2 = np.fromfile(unc2p, np.float32).reshape(ni, nx)
_extend(nodes, surface_points(unc2, nt, step=12, cmap='cool'))
_extend(nodes, fault_skin_points(skin_dir))
_extend(nodes, well_log_points(logp, nt))
_extend(nodes, pick_points())
cigvis.plot3D(
nodes,
view=cigvis.Plot3DView(
size=(820, 680),
azimuth=-65.0,
elevation=22.0,
fov=15.0,
axis_scales=(1, 1, 1.7),
zoom_factor=1.35,
),
save=cigvis.Plot3DSave(path='example.png'),
)